I have two borons deployed in a semi accessible location (1 hour drive to visit) meant to do basic GPS tracking on a piece of equipment using adafruit ultimate GPS. These two devices are about 0.5 miles from each other and should be identical, but I’ve experienced some issues that I’m not even sure how to start diagnosing. Writing the code for these devices is the extent of my coding skills and knowledge. I’m looking for ideas about how to start diagnosing if my code is causing the devices to lock up or freeze up, or if it’s a power related problem. Both devices are in the exact same setup and firmware. **If you see an issue, great, but if you have recommendations of steps or diagnostic features I should research, also great! **
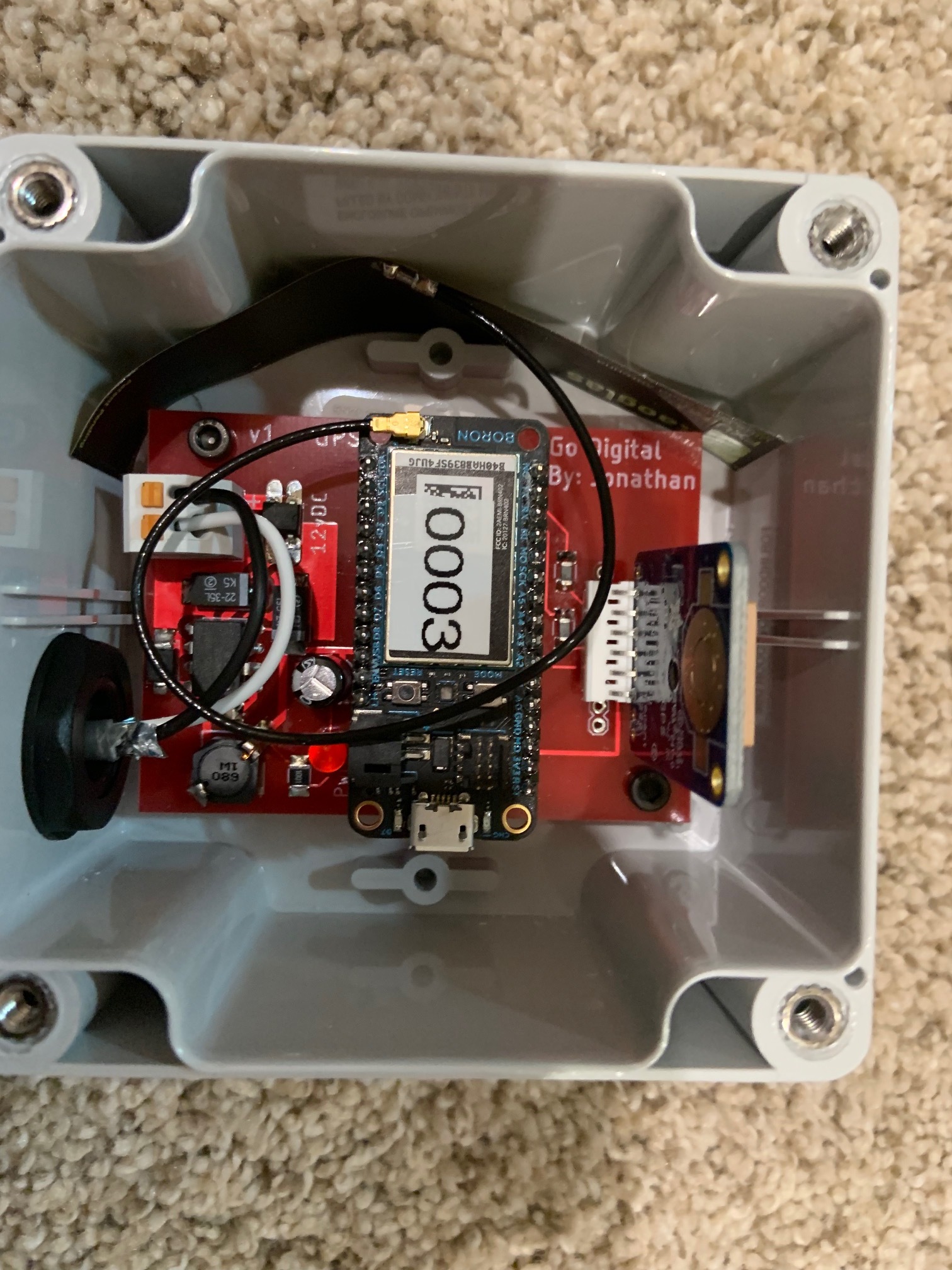
As a note, the power supply is probably not very clean and could be a problem, the equipment natively has a 480V transformer stepping down to 120V single phase. My device has a 120VAC to 12VDC converter off board and then a 12 to 5V converter circuit on the board. I have 2 other devices meant to control relays that have had no issue with almost the exact same power setup in weeks deployed in a slightly different piece of equipment.
Device 1- Worked fine for 3 days and then started continuously restarting (every 2 min) as indicated by the console event terminal showing restarts and diagnostics. It was counting up to 40 disconnects. We manually cut the power and let it restart and it worked perfectly. I would blame cell signal, but 6 hours later we moved the device in the same area with no issues and while this error was occurring, no issues occurred on the similar device .5 miles away (perfectly flat terrain, both devices record around 50,50 on strength and cell quality). The device has run since then >1 week with no issue.
Device 2 - Device 2 is restarting every 12-24 hours, and otherwise works as normal. With the same exact code, device 1 does not have this issue. To make it weirder, I believe it worked fine originally for a few days. We then reset the machine which flashed power.
I don’t know if I have an electrical issue with my base power supply, poor coding practices causing problems, or issues on the circuit board I built. My only idea to diagnose is to deploy a second device along side device 2 feeding on the same power and see if they both experience issues. What I’d like are some ideas on how to remotely diagnose code performance. Is there a way to track when a catastrophic issue occurs and send that once the device restarts.
I deployed all my prototype devices. I’m getting parts to build another one to sit at home where I can watch it, but I think the medium to poor cell service and power on site may not allow me to recreate what’s causing the issues.
Thank you for any help!
// This #include statement was automatically added by the Particle IDE.
#include <AssetTracker.h>
// This #include statement was automatically added by the Particle IDE.
// Used to keep track of the last time we published data
char dev_name[32] = "";
char msg[16] = " Restarted";
char startupMsg[50];
bool publishName = false;
uint32_t lastGPSUpdate = 0;
uint32_t alertSetTime = 0;
// How many minutes between publishes? 10+ recommended for long-time continuous publishing!
int delaySeconds = 2;
int latPivotAddr = 10;
int longPivotAddr = 30;
//float latPivot = EEPROM.read(latPivotAddr);
//float longPivot = EEPROM.read(longPivotAddr);
float latPivot = 34.941898; //MCEast34.941898 //MCWest34.941953;
float longPivot = -102.337646; //MCEast-102.337646 //MCEast-102.346287;
double latPivotReported; //Only need float for GPS, but cloud requries double as exposed variable.
double longPivotReported; //Only need float for GPS, but cloud requries double as exposed variable.
float latGPS;
float longGPS;
float latGPS30m =0;
float longGPS30m =0;
float d30m = 0;
int brng;
int alertBrng = 0;
bool alertState = false;
bool publishedAlert = false;
//bool thirtyMinElapsed = false;
bool timeToUpdateDistance = false;
bool publishFlag = false;
int publishFreq = 5; //min between publish
int alertTriggerDist = 10;
bool startUpComplete = false;
bool firstDistCaptured = false;
Timer timer30m(60000 * 30, distance30mFunc); // 60 sec * 30 = 30 min
Timer publishTimer(60000 * publishFreq, publishFunc);
float updateLongPivot(String command);
float updateLatPivot(String command);
int updateAlertBrng(String command);
// Creating an AssetTracker named 't' for us to reference
AssetTracker t = AssetTracker();
void setup() {
Particle.function("PivotLong", updateLongPivot);
Particle.function("PivotLat", updateLatPivot);
Particle.function("MinDistAlrm", updateAlertTriggerDist);
Particle.function("AlertState", updateAlertState);
for (uint32_t ms = millis(); millis() - ms < 1000; Particle.process()); //adhere to data limits
Particle.function("SetAlert", updateAlertBrng);
Particle.variable("PivotLong", longPivotReported);
Particle.variable("PivotLat", latPivotReported);
Particle.variable("Bearing", brng);
for (uint32_t ms = millis(); millis() - ms < 1000; Particle.process()); //adhere to data limits
Particle.variable("AlertBearing", alertBrng);
Particle.variable("AlertState", alertState);
Particle.subscribe("particle/device/name", handler);
Particle.publish("particle/device/name");
for (uint32_t ms = millis(); millis() - ms < 3000 && !publishName && Particle.connected(); Particle.process());
strcpy(startupMsg, dev_name);
strcat(startupMsg, msg);
Particle.publish("twilio_sms", startupMsg, PRIVATE);
//Particle.publish("restart","restarted");
//Particle.publish("twilio_sms_test", startupMsg, PRIVATE);
// Sets up all the necessary AssetTracker bits
t.begin();
// Enable the GPS module. Defaults to off to save power.
// Takes 1.5s or so because of delays.
t.gpsOn();
// Opens up a Serial port so you can listen over USB
// Serial.begin(9600);
/*
if(latPivot = 0xffffffff)
{
//EEPROM was empty -> initialize value
latPivot = 34.986503;
}
if(longPivot = 0xffffffff)
{
//EEPROM was empty -> initialize value
longPivot = -102.380795;
}
*/
latPivotReported = latPivot; //Only need float for GPS, but cloud requries double as exposed variable.
longPivotReported = longPivot; //Only need float for GPS, but cloud requries double as exposed variable.
uint32_t startTime = millis();
publishTimer.start();
}
// loop() runs continuously
void loop() {
// You'll need to run this every loop to capture the GPS output
t.updateGPS();
if(startUpComplete == false)
{
if(t.gpsFix() == true)
{
timer30m.start();
startUpComplete = true;
latGPS30m = t.readLatDeg();
longGPS30m = t.readLonDeg();
}
}
if (millis()-lastGPSUpdate > delaySeconds*1000) { //could probably run without delay, but kept in for no specific reason
lastGPSUpdate = millis();
latGPS = t.readLatDeg();
longGPS = t.readLonDeg();
brng = bearing(latPivot, longPivot, latGPS, longGPS);
//determine if pivot has reached alert bearing set by user
if((alertState == true) && (brng == alertBrng) && (publishedAlert == false)){ //possible issue, what if it's walking fast and the GPS jumps?
//alertstate - only set alerts if allerttriggers are on, publishedAlert - only send alert message once, skip if this already happend
//for(;Particle.connected(); Particle.process());
Particle.publish("twilio_sms", dev_name, PRIVATE);
//Particle.publish("twilio_sms_test", dev_name, PRIVATE);
publishedAlert = true;
alertState = false; //between alertState and publishedAlert, one of them is redundant
for (uint32_t ms = millis(); millis() - ms < 500; Particle.process());
}
//deterine if pivot has moved (give pivot 30 min after startup before alarm will trigger)
if (millis() - alertSetTime > 1000 * 1800){ //1800 secons = 30 min
if((alertState == true) && (publishedAlert == false) && (d30m < alertTriggerDist) && (firstDistCaptured == true)){ //&& (thirtyMinElapsed = true)
//for(;Particle.connected(); Particle.process());
Particle.publish("twilio_sms", dev_name, PRIVATE);
//Particle.publish("twilio_sms_test", dev_name, PRIVATE);
publishedAlert = true;
alertState = false;
for (uint32_t ms = millis(); millis() - ms < 500; Particle.process());
}
}
}
if (timeToUpdateDistance == true)
{
d30m = distance(latGPS30m,longGPS30m,latGPS,longGPS);
latGPS30m = latGPS;
longGPS30m = longGPS;
//thirtyMinElapsed = true;
timeToUpdateDistance = false;
firstDistCaptured = true;
}
if(publishFlag == true)
{
CellularSignal sig = Cellular.RSSI();
int strength = sig.getStrength();
int quality = sig.getQuality();
Particle.publish("Pivot", (String)latGPS + "," + (String)longGPS + ":" + (String)brng + ":" + (String)alertBrng + ":" + (String)d30m + ":" + (String)alertState + ":" + (String)strength + ":" + (String)quality);
publishFlag = false;
}
}
void publishFunc()
{
publishFlag = true;
}
void handler(const char *topic, const char *data) {
strncpy(dev_name, data, sizeof(dev_name)-1);
publishName = true;
}
void distance30mFunc() { //triggers a check of the distance traveled ever 30 min, main loop resets to false after updating value
timeToUpdateDistance = true;
}
float updateLongPivot(String command)
{
float temp;
temp = command.toFloat();
if ((temp < -180) || (temp > 180))
{
return -1;
}
else
{
longPivot = temp;
//EEPROM.put(longPivotAddr, longPivot);
longPivotReported = longPivot; //Only need float for GPS, but cloud requries double as exposed variable.
return temp;
}
}
float updateLatPivot(String command)
{
float temp;
temp = command.toFloat();
if ((temp < -90) || (temp > 90))
{
return -1;
}
else
{
latPivot = temp;
//EEPROM.put(latPivotAddr, latPivot);
latPivotReported = latPivot; //Only need float for GPS, but cloud requries double as exposed variable.
return temp;
}
}
int updateAlertBrng(String command)
{
int temp;
temp = command.toInt();
if((temp<0) || (temp > 360)){ //check that value is within the possible degrees range
return -1;
}
if((temp>=0) && (temp<=359)){
alertBrng = temp;
}
else{
alertBrng = 0; //if the user enters 360, default to 0
}
alertState = true;
publishedAlert = false;
//thirtyMinElapsed = false;
alertSetTime = millis();
return alertBrng;
}
int updateAlertTriggerDist(String command)
{
int temp;
temp = command.toInt();
if((temp <= 0) || (temp > 1000))
{
return -1;
}
else
{
alertTriggerDist = temp;
return temp;
}
}
int updateAlertState(String command)
{
if((command == "off") || (command == "false"))
{
alertState = false;
return 1;
}
if((command == "on") || (command == "true"))
{
alertState = true;
return 1;
}
return -1;
}
int bearing(float lat,float lon,float lat2,float lon2){
float teta1 = radians(lat);
float teta2 = radians(lat2);
float delta1 = radians(lat2-lat);
float delta2 = radians(lon2-lon);
//==================Heading Formula Calculation================//
float y = sin(delta2) * cos(teta2);
float x = cos(teta1)*sin(teta2) - sin(teta1)*cos(teta2)*cos(delta2);
float brng = atan2(y,x);
brng = degrees(brng);// radians to degrees
brng = ( ((int)brng + 360) % 360 ); //360 doesn't exist, it returns the value of 0
return brng;
}
int distance(float lat1,float long1,float lat2,float long2) {
float d_ew = (long2-long1)*cos(radians(lat1)) * 69; //69 is the approximate distance between
//longitude degrees at equator in statue miles, cosine approximates north
float d_ns = (lat2-lat1) * 68.92; //68.92 is the approximate distance between latitude degrees at 34 degrees north.
float d = sqrt(d_ew*d_ew + d_ns*d_ns) * 5280;
return (int)d;
}
float degrees(float radians) {
float drg;
drg = radians * 180 / M_PI;
return drg;
}
float radians(float degrees) {
float rad;
rad = degrees * M_PI / 180;
return rad;
}