Here it the code i used. The bold part is the addiction
Btw i used the whole thing all the afternoon, playing around it. Had no problems with. How could it happen all of sudden?
// --------------------------------------------------------------------------- Motors
int motor_left[] = {A5, A4};
int motor_right[] = {D4, D5};
int leftSpeedPin = D1;
int rightSpeedPin = D0;
int motorSpeed=0;
// --------------------------------------------------------------------------- Setup
void setup() {
Serial.begin(9600);
// Setup motors
int i;
for(i = 0; i < 2; i++){
pinMode(motor_left[i], OUTPUT);
pinMode(motor_right[i], OUTPUT);
}
pinMode(leftSpeedPin, OUTPUT);
pinMode(rightSpeedPin, OUTPUT);
Particle.function("forward",driveForward);
Particle.function("stop",motorStop);
Particle.function("right",driveRight);
Particle.function("left",driveLeft);
Particle.function("back",driveBackward);
Particle.function("speed", setSpeed);
setSpeed("60"); // <-- addition
}
void loop() {
}
int setSpeed(String mov)
{ int velocit =0;
velocit = mov.toInt();
int motorValue = map(velocit, 0, 100, 0, 255);
analogWrite(leftSpeedPin, motorValue);
analogWrite(rightSpeedPin, motorValue);
return 0;
}
int motorStop(String movimento){
digitalWrite(motor_left[0], LOW);
digitalWrite(motor_left[1], LOW);
digitalWrite(motor_right[0], LOW);
digitalWrite(motor_right[1], LOW);
delay(25);
return 0;
}
int driveForward(String movimento)
{
digitalWrite(motor_left[0], HIGH);
digitalWrite(motor_left[1], LOW);
digitalWrite(motor_right[0], HIGH);
digitalWrite(motor_right[1], LOW);
return 0;
}
int driveBackward(String movimento){
digitalWrite(motor_left[0], LOW);
digitalWrite(motor_left[1], HIGH);
digitalWrite(motor_right[0], LOW);
digitalWrite(motor_right[1], HIGH);
return 0;
}
int driveRight(String movimento){
digitalWrite(motor_left[0], LOW);
digitalWrite(motor_left[1], HIGH);
digitalWrite(motor_right[0], HIGH);
digitalWrite(motor_right[1], LOW);
return 0;
}
int driveLeft( String Movimento){
digitalWrite(motor_left[0], HIGH);
digitalWrite(motor_left[1], LOW);
digitalWrite(motor_right[0], LOW);
digitalWrite(motor_right[1], HIGH);
return 0;
}
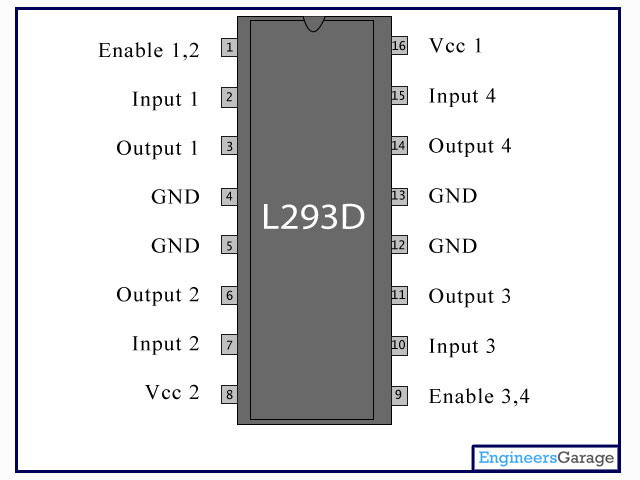
And instead this is the config, exept that i had no battery pack but direct link from my Photon to the Vcc1 and Vcc2 of the l293d