For reference, here is the code and libraries I am using, in case it helps with troubleshooting, or in case someone else in the future wants to use them…
current_monitor.ino
/* Particle Electron current and voltage measurement using the INA226 CJMCU Breakout Board */
// ************************** Libraries Needed To Compile The Script **************************
#include <INA226.h> //library for the current and voltage sensor
#include <Ubidots.h>
#define TOKEN "mytoken" // Your unique Ubidots TOKEN. Do not share this token publicly.
Ubidots ubidots(TOKEN);
// ************ INA226 Current and Voltage Monitor Definitions *****************************************
INA226 ina;
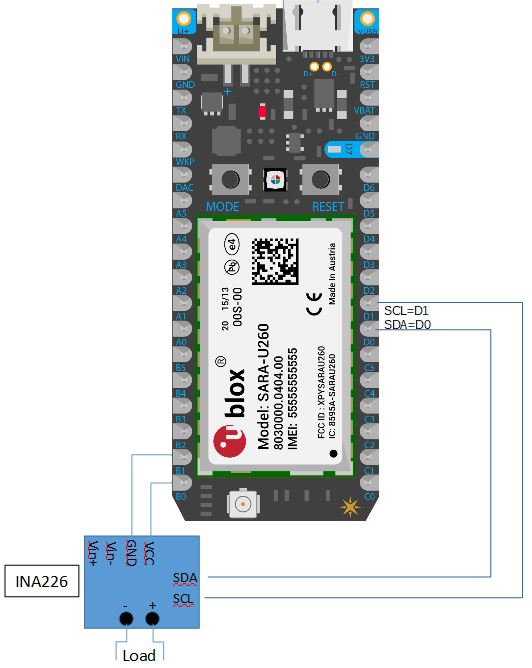
const int CurrentSensorPowerPin=B0; //current and voltage sensor power pin
const int CurrentSensorGndPin =B1; //current and voltage sensor GROUND pin
//const int CurrentSensorSDAPin =D0; //I2C communication pin
//const int CurrentSensorSCLPin =D1; //I2C communication pin
const int LightPin =D7; // light for debugging
float shuntcurrentA=0; //i7nitalize variables for INA226
float shuntvoltageV=0;
float busvoltageV=0;
float buspowerW=0;
int Reading_Delay_milliseconds=15000; // delay between readings in milliseconds.
// *********************************Setup - runs Once and sets pins etc ******************************************************
void setup()
{
//SET UP PINS FOR SENSORS:
//Serial.begin(9600); // only used for wired connection serial communication
pinMode(CurrentSensorPowerPin , OUTPUT); // set the powerpin as an output
digitalWrite(CurrentSensorPowerPin , HIGH); //Turn it on for now
pinMode(CurrentSensorGndPin , OUTPUT);//setting pin for ground for the EC sensor as an ouput
digitalWrite(CurrentSensorGndPin,LOW);//We can leave the ground connected permanantly
pinMode(LightPin , OUTPUT); // set the lightpin as an output (for troubleshooting)
// Initialize INA226 Current & Voltage Sensor. Default INA226 address is 0x40
delay(500);// gives sensor time to settle
ina.begin();
// Configure INA226:
ina.configure(INA226_AVERAGES_1, INA226_BUS_CONV_TIME_1100US, INA226_SHUNT_CONV_TIME_1100US, INA226_MODE_SHUNT_BUS_CONT);
// Calibrate INA226. (Rshunt = 0.01 ohm, Max excepted current = 4A) (Rshunt = .008 ohm, Max current=11A):
ina.calibrate(0.008, 11);
}; // ******************************************* End of Setup **********************************************************************
// *******************************************************************************************************************
// ************************************* Main Loop - Runs Forever ****************************************************
// *******************************************************************************************************************
// The main loop is run repeatedly. It calls functions for taking sensor readings, printing results, etc.
void loop()
{
digitalWrite(LightPin , HIGH); //Turn on light
GetCurrent(); //Calls code to get current and voltage
PrintReadings(); // Calls Print routine [below main loop]
digitalWrite(LightPin , LOW); //Turn off light
delay(Reading_Delay_milliseconds); //delay between readings in milliseconds.
};
// *******************************************************************************************************************
// ************************************** End Of Main Loop ***********************************************************
// *******************************************************************************************************************
// ************ GetCurrent Function (This Loop Is called From Main Loop)********************************************************
void GetCurrent(){
// reads current and voltage from the INA219 or INA229 sensor
shuntcurrentA=ina.readShuntCurrent();
shuntvoltageV=ina.readShuntVoltage();
busvoltageV=ina.readBusVoltage();
buspowerW=ina.readBusPower();
delay(500);
};
// ****** Send Readings Function (This is where useful data is sent to the desired location) ******
void PrintReadings(){
ubidots.add("Current_A", shuntcurrentA);
ubidots.add("Shunt_Voltage_V", shuntvoltageV);
ubidots.add("Bus_Voltage_V", busvoltageV);
ubidots.add("buspowerW", buspowerW);
ubidots.sendAll(); //send the variables to Ubidots
}; // *********************** END OF PROGRAM ************************
INA226.h
/*
INA226.h - Header file for the Bi-directional Current/Power Monitor Arduino Library.
Version: 1.0.0
(c) 2014 Korneliusz Jarzebski
www.jarzebski.pl
This program is free software: you can redistribute it and/or modify
it under the terms of the version 3 GNU General Public License as
published by the Free Software Foundation.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <http://www.gnu.org/licenses/>.
*/
#ifndef INA226_h
#define INA226_h
//#if ARDUINO >= 100
//#include "Arduino.h"
//#else
//#include "WProgram.h"
//#endif
#include "Particle.h"
#define INA226_ADDRESS (0x40)
#define INA226_REG_CONFIG (0x00)
#define INA226_REG_SHUNTVOLTAGE (0x01)
#define INA226_REG_BUSVOLTAGE (0x02)
#define INA226_REG_POWER (0x03)
#define INA226_REG_CURRENT (0x04)
#define INA226_REG_CALIBRATION (0x05)
#define INA226_REG_MASKENABLE (0x06)
#define INA226_REG_ALERTLIMIT (0x07)
#define INA226_BIT_SOL (0x8000)
#define INA226_BIT_SUL (0x4000)
#define INA226_BIT_BOL (0x2000)
#define INA226_BIT_BUL (0x1000)
#define INA226_BIT_POL (0x0800)
#define INA226_BIT_CNVR (0x0400)
#define INA226_BIT_AFF (0x0010)
#define INA226_BIT_CVRF (0x0008)
#define INA226_BIT_OVF (0x0004)
#define INA226_BIT_APOL (0x0002)
#define INA226_BIT_LEN (0x0001)
typedef enum
{
INA226_AVERAGES_1 = 0b000,
INA226_AVERAGES_4 = 0b001,
INA226_AVERAGES_16 = 0b010,
INA226_AVERAGES_64 = 0b011,
INA226_AVERAGES_128 = 0b100,
INA226_AVERAGES_256 = 0b101,
INA226_AVERAGES_512 = 0b110,
INA226_AVERAGES_1024 = 0b111
} ina226_averages_t;
typedef enum
{
INA226_BUS_CONV_TIME_140US = 0b000,
INA226_BUS_CONV_TIME_204US = 0b001,
INA226_BUS_CONV_TIME_332US = 0b010,
INA226_BUS_CONV_TIME_588US = 0b011,
INA226_BUS_CONV_TIME_1100US = 0b100,
INA226_BUS_CONV_TIME_2116US = 0b101,
INA226_BUS_CONV_TIME_4156US = 0b110,
INA226_BUS_CONV_TIME_8244US = 0b111
} ina226_busConvTime_t;
typedef enum
{
INA226_SHUNT_CONV_TIME_140US = 0b000,
INA226_SHUNT_CONV_TIME_204US = 0b001,
INA226_SHUNT_CONV_TIME_332US = 0b010,
INA226_SHUNT_CONV_TIME_588US = 0b011,
INA226_SHUNT_CONV_TIME_1100US = 0b100,
INA226_SHUNT_CONV_TIME_2116US = 0b101,
INA226_SHUNT_CONV_TIME_4156US = 0b110,
INA226_SHUNT_CONV_TIME_8244US = 0b111
} ina226_shuntConvTime_t;
typedef enum
{
INA226_MODE_POWER_DOWN = 0b000,
INA226_MODE_SHUNT_TRIG = 0b001,
INA226_MODE_BUS_TRIG = 0b010,
INA226_MODE_SHUNT_BUS_TRIG = 0b011,
INA226_MODE_ADC_OFF = 0b100,
INA226_MODE_SHUNT_CONT = 0b101,
INA226_MODE_BUS_CONT = 0b110,
INA226_MODE_SHUNT_BUS_CONT = 0b111,
} ina226_mode_t;
class INA226
{
public:
bool begin(uint8_t address = INA226_ADDRESS);
bool configure(ina226_averages_t avg = INA226_AVERAGES_1, ina226_busConvTime_t busConvTime = INA226_BUS_CONV_TIME_1100US, ina226_shuntConvTime_t shuntConvTime = INA226_SHUNT_CONV_TIME_1100US, ina226_mode_t mode = INA226_MODE_SHUNT_BUS_CONT);
bool calibrate(float rShuntValue = 0.1, float iMaxExcepted = 2);
ina226_averages_t getAverages(void);
ina226_busConvTime_t getBusConversionTime(void);
ina226_shuntConvTime_t getShuntConversionTime(void);
ina226_mode_t getMode(void);
void enableShuntOverLimitAlert(void);
void enableShuntUnderLimitAlert(void);
void enableBusOvertLimitAlert(void);
void enableBusUnderLimitAlert(void);
void enableOverPowerLimitAlert(void);
void enableConversionReadyAlert(void);
void setBusVoltageLimit(float voltage);
void setShuntVoltageLimit(float voltage);
void setPowerLimit(float watts);
void setAlertInvertedPolarity(bool inverted);
void setAlertLatch(bool latch);
bool isMathOverflow(void);
bool isAlert(void);
float readShuntCurrent(void);
float readShuntVoltage(void);
float readBusPower(void);
float readBusVoltage(void);
float getMaxPossibleCurrent(void);
float getMaxCurrent(void);
float getMaxShuntVoltage(void);
float getMaxPower(void);
private:
int8_t inaAddress;
float currentLSB, powerLSB;
float vShuntMax, vBusMax, rShunt;
void setMaskEnable(uint16_t mask);
uint16_t getMaskEnable(void);
void writeRegister16(uint8_t reg, uint16_t val);
int16_t readRegister16(uint8_t reg);
};
#endif
INA226.cpp
/*
INA226.cpp - Class file for the INA226 Bi-directional Current/Power Monitor Arduino Library.
Version: 1.0.0
(c) 2014 Korneliusz Jarzebski
www.jarzebski.pl
This program is free software: you can redistribute it and/or modify
it under the terms of the version 3 GNU General Public License as
published by the Free Software Foundation.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <http://www.gnu.org/licenses/>.
*/
//#if ARDUINO >= 100
//#include "Arduino.h"
//#else
//#include "WProgram.h"
//#endif
#include "Particle.h"
#include "INA226.h"
bool INA226::begin(uint8_t address)
{
Wire.begin();
inaAddress = address;
return true;
}
bool INA226::configure(ina226_averages_t avg, ina226_busConvTime_t busConvTime, ina226_shuntConvTime_t shuntConvTime, ina226_mode_t mode)
{
uint16_t config = 0;
config |= (avg << 9 | busConvTime << 6 | shuntConvTime << 3 | mode);
vBusMax = 36;
vShuntMax = 0.08192f;
writeRegister16(INA226_REG_CONFIG, config);
return true;
}
bool INA226::calibrate(float rShuntValue, float iMaxExpected)
{
uint16_t calibrationValue;
rShunt = rShuntValue;
float iMaxPossible, minimumLSB;
iMaxPossible = vShuntMax / rShunt;
minimumLSB = iMaxExpected / 32767;
currentLSB = (uint16_t)(minimumLSB * 100000000);
currentLSB /= 100000000;
currentLSB /= 0.0001;
currentLSB = ceil(currentLSB);
currentLSB *= 0.0001;
powerLSB = currentLSB * 25;
calibrationValue = (uint16_t)((0.00512) / (currentLSB * rShunt));
writeRegister16(INA226_REG_CALIBRATION, calibrationValue);
return true;
}
float INA226::getMaxPossibleCurrent(void)
{
return (vShuntMax / rShunt);
}
float INA226::getMaxCurrent(void)
{
float maxCurrent = (currentLSB * 32767);
float maxPossible = getMaxPossibleCurrent();
if (maxCurrent > maxPossible)
{
return maxPossible;
} else
{
return maxCurrent;
}
}
float INA226::getMaxShuntVoltage(void)
{
float maxVoltage = getMaxCurrent() * rShunt;
if (maxVoltage >= vShuntMax)
{
return vShuntMax;
} else
{
return maxVoltage;
}
}
float INA226::getMaxPower(void)
{
return (getMaxCurrent() * vBusMax);
}
float INA226::readBusPower(void)
{
return (readRegister16(INA226_REG_POWER) * powerLSB);
}
float INA226::readShuntCurrent(void)
{
return (readRegister16(INA226_REG_CURRENT) * currentLSB);
}
float INA226::readShuntVoltage(void)
{
float voltage;
voltage = readRegister16(INA226_REG_SHUNTVOLTAGE);
return (voltage * 0.0000025);
}
float INA226::readBusVoltage(void)
{
int16_t voltage;
voltage = readRegister16(INA226_REG_BUSVOLTAGE);
return (voltage * 0.00125);
}
ina226_averages_t INA226::getAverages(void)
{
uint16_t value;
value = readRegister16(INA226_REG_CONFIG);
value &= 0b0000111000000000;
value >>= 9;
return (ina226_averages_t)value;
}
ina226_busConvTime_t INA226::getBusConversionTime(void)
{
uint16_t value;
value = readRegister16(INA226_REG_CONFIG);
value &= 0b0000000111000000;
value >>= 6;
return (ina226_busConvTime_t)value;
}
ina226_shuntConvTime_t INA226::getShuntConversionTime(void)
{
uint16_t value;
value = readRegister16(INA226_REG_CONFIG);
value &= 0b0000000000111000;
value >>= 3;
return (ina226_shuntConvTime_t)value;
}
ina226_mode_t INA226::getMode(void)
{
uint16_t value;
value = readRegister16(INA226_REG_CONFIG);
value &= 0b0000000000000111;
return (ina226_mode_t)value;
}
void INA226::setMaskEnable(uint16_t mask)
{
writeRegister16(INA226_REG_MASKENABLE, mask);
}
uint16_t INA226::getMaskEnable(void)
{
return readRegister16(INA226_REG_MASKENABLE);
}
void INA226::enableShuntOverLimitAlert(void)
{
writeRegister16(INA226_REG_MASKENABLE, INA226_BIT_SOL);
}
void INA226::enableShuntUnderLimitAlert(void)
{
writeRegister16(INA226_REG_MASKENABLE, INA226_BIT_SUL);
}
void INA226::enableBusOvertLimitAlert(void)
{
writeRegister16(INA226_REG_MASKENABLE, INA226_BIT_BOL);
}
void INA226::enableBusUnderLimitAlert(void)
{
writeRegister16(INA226_REG_MASKENABLE, INA226_BIT_BUL);
}
void INA226::enableOverPowerLimitAlert(void)
{
writeRegister16(INA226_REG_MASKENABLE, INA226_BIT_POL);
}
void INA226::enableConversionReadyAlert(void)
{
writeRegister16(INA226_REG_MASKENABLE, INA226_BIT_CNVR);
}
void INA226::setBusVoltageLimit(float voltage)
{
uint16_t value = voltage / 0.00125;
writeRegister16(INA226_REG_ALERTLIMIT, value);
}
void INA226::setShuntVoltageLimit(float voltage)
{
uint16_t value = voltage * 25000;
writeRegister16(INA226_REG_ALERTLIMIT, value);
}
void INA226::setPowerLimit(float watts)
{
uint16_t value = watts / powerLSB;
writeRegister16(INA226_REG_ALERTLIMIT, value);
}
void INA226::setAlertInvertedPolarity(bool inverted)
{
uint16_t temp = getMaskEnable();
if (inverted)
{
temp |= INA226_BIT_APOL;
} else
{
temp &= ~INA226_BIT_APOL;
}
setMaskEnable(temp);
}
void INA226::setAlertLatch(bool latch)
{
uint16_t temp = getMaskEnable();
if (latch)
{
temp |= INA226_BIT_LEN;
} else
{
temp &= ~INA226_BIT_LEN;
}
setMaskEnable(temp);
}
bool INA226::isMathOverflow(void)
{
return ((getMaskEnable() & INA226_BIT_OVF) == INA226_BIT_OVF);
}
bool INA226::isAlert(void)
{
return ((getMaskEnable() & INA226_BIT_AFF) == INA226_BIT_AFF);
}
int16_t INA226::readRegister16(uint8_t reg)
{
int16_t value;
Wire.beginTransmission(inaAddress);
//#if ARDUINO >= 100
Wire.write(reg);
//#else
// Wire.send(reg);
//#endif
Wire.endTransmission();
delay(1);
Wire.beginTransmission(inaAddress);
Wire.requestFrom(inaAddress, 2);
while(!Wire.available()) {};
//#if ARDUINO >= 100
uint8_t vha = Wire.read();
uint8_t vla = Wire.read();
//#else
//uint8_t vha = Wire.receive();
//uint8_t vla = Wire.receive();
//#endif;
Wire.endTransmission();
value = vha << 8 | vla;
return value;
}
void INA226::writeRegister16(uint8_t reg, uint16_t val)
{
uint8_t vla;
vla = (uint8_t)val;
val >>= 8;
Wire.beginTransmission(inaAddress);
//#if ARDUINO >= 100
Wire.write(reg);
Wire.write((uint8_t)val);
Wire.write(vla);
// #else
//Wire.send(reg);
//Wire.send((uint8_t)val);
//Wire.send(vla);
//#endif
Wire.endTransmission();
}
UPDATE: excess #include statements removed from libraries above per ScruffR’s comment.