@ScruffR,
Absolutely. You have given me so many good suggestions in the past. I look forward to any suggestions you might have here.
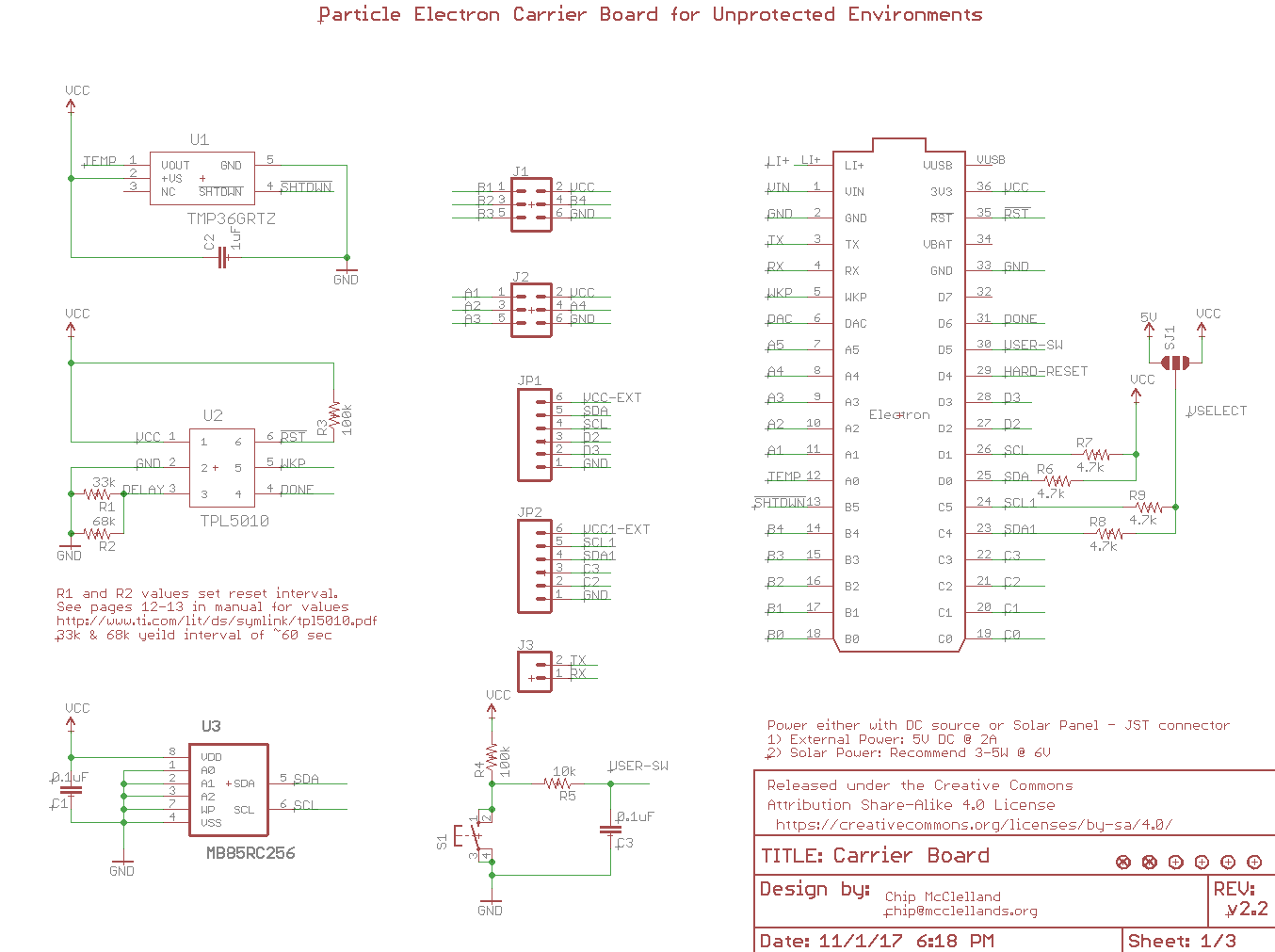
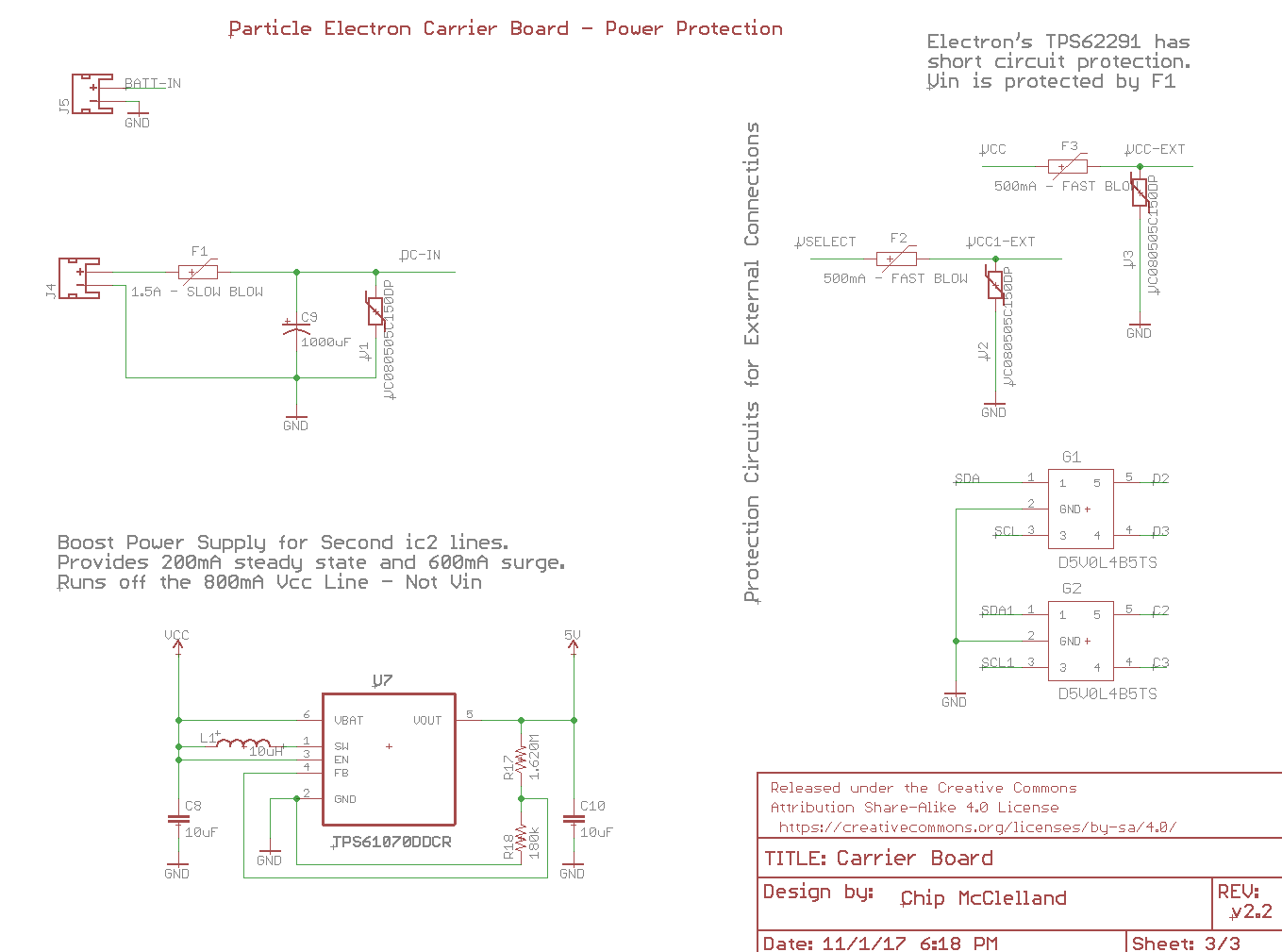
Schematics:
Page 1 - Electron and support chips
Page 2 - Power Control for switching both DC-IN and LiPo and supporting the “hard reset” feature
Page 3- Circuit Protection and the 5V boost converter for 5V i2c
blue
I think the main connections you would want to see are on page 1.
Also, here is my code, always open to suggestions on how to improve it.
/*
* Project Cellular-Solar-PIR
* Description: Cellular Connected Data Logger for Solar installations
* Author: Chip McClelland
* Date:8 October 2017
*/
// On the solar installation I am not using the hardware watchdog
// Easy place to change global numbers
//These defines let me change the memory map and configuration without hunting through the whole program
#define VERSIONNUMBER 7 // Increment this number each time the memory map is changed
#define WORDSIZE 8 // For the Word size
#define PAGESIZE 4096 // Memory size in bytes / word size - 256kb FRAM
// First Word - 8 bytes for setting global values
#define DAILYOFFSET 2 // First word of daily counts
#define HOURLYOFFSET 30 // First word of hourly counts (remember we start counts at 1)
#define DAILYCOUNTNUMBER 28 // used in modulo calculations - sets the # of days stored
#define HOURLYCOUNTNUMBER 4064 // used in modulo calculations - sets the # of hours stored - 256k (4096-14-2)
#define VERSIONADDR 0x0 // Memory Locations By Name not Number
#define SENSITIVITYADDR 0x1 // For the 1st Word locations
#define DEBOUNCEADDR 0x2 // One uint8_t for debounce (stored in cSec mult by 10 for mSec)
#define RESETCOUNT 0x3 // This is where we keep track of how often the Electron was reset
#define DAILYPOINTERADDR 0x4 // One uint8_t for daily pointer
#define HOURLYPOINTERADDR 0x5 // Two bytes for hourly pointer
#define CONTROLREGISTER 0x7 // This is the control register for storing the current state - future use
//Second Word - 8 bytes for storing current counts
#define CURRENTHOURLYCOUNTADDR 0x8 // Current Hourly Count - 16 bits
#define CURRENTDAILYCOUNTADDR 0xA // Current Daily Count - 16 bits
#define CURRENTCOUNTSTIME 0xC // Time of last count - 32 bits
//These are the hourly and daily offsets that make up the respective words
#define DAILYDATEOFFSET 1 //Offsets for the value in the daily words
#define DAILYCOUNTOFFSET 2 // Count is a 16-bt value
#define DAILYBATTOFFSET 4 // Where the battery charge is stored
#define HOURLYCOUNTOFFSET 4 // Offsets for the values in the hourly words
#define HOURLYBATTOFFSET 6 // Where the hourly battery charge is stored
// Finally, here are the variables I want to change often and pull them all together here
#define SOFTWARERELEASENUMBER "0.60"
#define PARKCLOSES 20
#define PARKOPENS 7
// Included Libraries
#include "Adafruit_FRAM_I2C.h" // Library for FRAM functions
#include "FRAM-Library-Extensions.h" // Extends the FRAM Library
#include "electrondoc.h" // Documents pinout
// Prototypes and System Mode calls
SYSTEM_MODE(SEMI_AUTOMATIC); // This will enable user code to start executing automatically.
SYSTEM_THREAD(ENABLED); // Means my code will not be held up by Particle processes.
FuelGauge batteryMonitor; // Prototype for the fuel gauge (included in Particle core library)
PMIC power; //Initalize the PMIC class so you can call the Power Management functions below.
// State Maching Variables
enum State { INITIALIZATION_STATE, ERROR_STATE, IDLE_STATE, SLEEPING_STATE, NAPPING_STATE, REPORTING_STATE, RESP_WAIT_STATE };
State state = INITIALIZATION_STATE;
// Pin Constants
const int intPin = D3; // Acclerometer interrupt pin
const int blueLED = D7; // This LED is on the Electron itself
const int userSwitch = D5; // User switch with a pull-up resistor
const int tmp36Pin = A0; // Simple Analog temperature sensor
const int tmp36Shutdwn = B5; // Can turn off the TMP-36 to save energy
const int donePin = D6; // Pin the Electron uses to "pet" the watchdog
const int wakeUpPin = A7; // This is the Particle Electron WKP pin
const int hardResetPin = D4; // Power Cycles the Electron and the Carrier Board
// Timing Variables
unsigned long publishTimeStamp = 0; // Keep track of when we publish a webhook
unsigned long webhookWaitTime = 45000; // How long will we let a webhook go before we give up
unsigned long resetWaitTimeStamp = 0; // Starts the reset wait clock
unsigned long resetWaitTime = 30000; // Will wait this lonk before resetting.
unsigned long sleepDelay = 90000; // Longer delay before sleep when booting up or on the hour - gives time to flash
unsigned long timeTillSleep = 0; // This will either be short or long depending on nap or sleep
unsigned long napDelay = 3000; // Normal amount of time after event before taking a nap
unsigned long lastEvent = 0; // Keeps track of the last time there was an event
bool waiting = false; // Keeps track of things that are in flight - enables non-blocking code
bool readyForBed = false; // Keeps track of the things that you do once before sleep
// Program Variables
int temperatureF; // Global variable so we can monitor via cloud variable
int resetCount; // Counts the number of times the Electron has had a pin reset
bool ledState = LOW; // variable used to store the last LED status, to toggle the light
const char* releaseNumber = SOFTWARERELEASENUMBER; // Displays the release on the menu
// FRAM and Unix time variables
time_t t;
byte lastHour = 0; // For recording the startup values
byte lastDate = 0; // These values make sure we record events if time has lapsed
int hourlyPersonCount = 0; // hourly counter
int hourlyPersonCountSent = 0; // Person count in flight to Ubidots
int dailyPersonCount = 0; // daily counter
int dailyPersonCountSent = 0; // Daily person count in flight to Ubidots
bool dataInFlight = false; // Tracks if we have sent data but not yet cleared it from counts until we get confirmation
byte currentHourlyPeriod; // This is where we will know if the period changed
byte currentDailyPeriod; // We will keep daily counts as well as period counts
// PIR Sensor variables
volatile bool sensorDetect = false; // This is the flag that an interrupt is triggered
// Battery monitor
int stateOfCharge = 0; // stores battery charge level value
//Menu and Program Variables
uint32_t lastBump = 0; // set the time of an event
bool inTest = false; // Are we in a test or not
retained char Signal[17]; // Used to communicate Wireless RSSI and Description
const char* levels[6] = {"Poor", "Low", "Medium", "Good", "Very Good", "Great"};
void setup()
{
pinMode(intPin,INPUT);
pinMode(wakeUpPin,INPUT); // This pin is active HIGH
pinMode(blueLED, OUTPUT); // declare the Blue LED Pin as an output
pinMode(tmp36Shutdwn,OUTPUT); // Supports shutting down the TMP-36 to save juice
digitalWrite(tmp36Shutdwn, HIGH); // Turns on the temp sensor
pinMode(donePin,OUTPUT); // Allows us to pet the watchdog
pinMode(hardResetPin,OUTPUT); // For a hard reset - HIGH
if(!connectToParticle()) Particle.publish("State","Initalizing"); // Will continue - even if not connected.
power.begin();
power.disableWatchdog();
power.disableDPDM();
power.setInputVoltageLimit(4840); //Set the lowest input voltage to 4.84 volts. This keeps my 5v solar panel from operating below 4.84 volts (defauly 4360)
power.setInputCurrentLimit(900); // default is 900mA
power.setChargeCurrent(0,0,0,0,0,0); // default is 512mA
power.setChargeVoltage(4112); // default is 4.112V termination voltage
power.enableDPDM();
stateOfCharge = int(batteryMonitor.getSoC()); // Percentage of full charge
attachInterrupt(wakeUpPin, watchdogISR, RISING); // The watchdog timer will signal us and we have to respond
attachInterrupt(intPin,sensorISR,RISING); // Will know when the PIR sensor is triggered
char responseTopic[125];
String deviceID = System.deviceID();
deviceID.toCharArray(responseTopic,125);
Particle.subscribe(responseTopic, UbidotsHandler, MY_DEVICES); // Subscribe to the integration response event
Particle.variable("HourlyCount", hourlyPersonCount);
Particle.variable("DailyCount", dailyPersonCount);
Particle.variable("Signal", Signal);
Particle.variable("ResetCount", resetCount);
Particle.variable("Temperature",temperatureF);
Particle.variable("Release",releaseNumber);
Particle.variable("stateOfChg", stateOfCharge);
Particle.function("startStop", startStop);
Particle.function("resetFRAM", resetFRAM);
Particle.function("resetCounts",resetCounts);
Particle.function("Reset",resetNow);
Particle.function("HardReset",hardResetNow);
Particle.function("SleepInFive",sleepInFive);
Particle.function("SendNow",sendNow);
if (!fram.begin()) { // you can stick the new i2c addr in here, e.g. begin(0x51);
Particle.publish("Startup","No FRAM");
state = ERROR_STATE;
}
if (FRAMread8(VERSIONADDR) != VERSIONNUMBER) { // Check to see if the memory map in the sketch matches the data on the chip
Particle.publish("Startup","FRAM mismatch - erasing");
ResetFRAM(); // Reset the FRAM to correct the issue
if (FRAMread8(VERSIONADDR) != VERSIONNUMBER) state = ERROR_STATE; // Resetting did not fix the issue
}
resetCount = FRAMread8(RESETCOUNT); // Retrive system recount data from FRAMwrite8
if (System.resetReason() == RESET_REASON_PIN_RESET) // Check to see if we are starting from a pin reset
{
resetCount++;
FRAMwrite8(RESETCOUNT,static_cast<uint8_t>(resetCount)); // If so, store incremented number - watchdog must have done This
}
Time.zone(-5); // Set time zone to Eastern USA daylight saving time
takeMeasurements();
StartStopTest(1); // Default action is for the test to be running
timeTillSleep = sleepDelay; // Set initial delay for 60 seconds
if (stateOfCharge <= 20)
{
state = SLEEPING_STATE; // Low battery level will cause an ERROR and reset which brings us here
Particle.publish("State","Critical Battery - Sleeping");
delay(2000);
}
else if (state != ERROR_STATE) // IDLE unless error from above code
{
state = IDLE_STATE; // Idle and look for events to change the state
Particle.publish("State","Idle");
}
}
void loop()
{
switch(state) {
case IDLE_STATE:
if(hourlyPersonCountSent) { // Cleared here as there could be counts coming in while "in Flight"
hourlyPersonCount -= hourlyPersonCountSent; // Confirmed that count was recevied - clearing
FRAMwrite16(CURRENTHOURLYCOUNTADDR, static_cast<uint16_t>(hourlyPersonCount)); // Load Hourly Count to memory
hourlyPersonCountSent = 0;
}
if (sensorDetect) recordCount(); // The ISR had raised the sensor flag
if (millis() >= (lastEvent + timeTillSleep)) state = NAPPING_STATE; // Too long since last sensor flag - time to nap
if (Time.hour() >= PARKCLOSES || Time.hour() < PARKOPENS) state = SLEEPING_STATE; // The park is closed, time to sleep
if (Time.hour() != currentHourlyPeriod && !readyForBed) state = REPORTING_STATE; // We want to report on the hour but not after bedtime
break;
case SLEEPING_STATE: { // This state is triggered once the park closes and runs until it opens
if (!readyForBed) // Only do these things once - at bedtime
{
if (Particle.connected()) {
disconnectFromParticle(); // If connected, we need to disconned and power down the modem
}
detachInterrupt(intPin); // Done sensing for the day
dailyPersonCount = 0; // All the counts have been reported so time to zero everything
FRAMwrite16(CURRENTDAILYCOUNTADDR, 0); // Reset the counts in FRAM as well
resetCount = 0;
FRAMwrite8(RESETCOUNT,resetCount);
hourlyPersonCount = 0;
FRAMwrite16(CURRENTHOURLYCOUNTADDR, 0);
ledState = false;
digitalWrite(blueLED,LOW); // Turn off the LED
digitalWrite(tmp36Shutdwn, LOW); // Turns off the temp sensor
digitalWrite(donePin,HIGH);
digitalWrite(donePin,LOW); // Pet the watchdog
readyForBed = true; // Set the flag for the night
}
int secondsToHour = (60*(60 - Time.minute())); // Time till the top of the hour
System.sleep(SLEEP_MODE_DEEP,secondsToHour); // Very deep sleep till the next hour (cellular, uC and Fuel Gauge off)
digitalWrite(donePin,HIGH);
digitalWrite(donePin,LOW); // Pet the watchdog
if (Time.hour() < PARKCLOSES && Time.hour() >= PARKOPENS) // Time to wake up and go to work
{
state = IDLE_STATE; // Go to IDLE state for more instructions once we awake
lastEvent = millis(); // Reset millis so we don't wake and then nap again
attachInterrupt(intPin,sensorISR,RISING); // Sensor interrupt from low to high
currentDailyPeriod = Time.day(); // Waking from a night's sleep - it is a new day
digitalWrite(tmp36Shutdwn,HIGH); // Turn on the temp sensor
readyForBed = false;
}
} break;
case NAPPING_STATE: {
if (Particle.connected())
{
disconnectFromParticle(); // If connected, we need to disconned and power down the modem
timeTillSleep = napDelay; // Set the time we will wait before napping again
}
ledState = false; // Turn out the light
digitalWrite(blueLED,LOW); // Turn off the LED
sensorDetect = true; // Woke up so there must have been an event
lastEvent = millis(); // Reset millis so we don't wake and then nap again
int secondsToHour = (60*(60 - Time.minute())); // Time till the top of the hour
System.sleep(intPin,RISING,secondsToHour); // Sensor will wake us with an interrupt
state = IDLE_STATE; // Back to the IDLE_STATE after a nap
} break;
case REPORTING_STATE: {
timeTillSleep = sleepDelay; // Sets the sleep delay to give time to flash if needed
if (!connectToParticle()) {
state = ERROR_STATE;
break;
}
takeMeasurements();
LogHourlyEvent();
sendEvent();
publishTimeStamp = millis();
digitalWrite(donePin,HIGH);
digitalWrite(donePin,LOW); // Pet the watchdog once an hour
Particle.publish("State","Waiting for Response");
state = RESP_WAIT_STATE; // Wait for Response
} break;
case RESP_WAIT_STATE:
if (!dataInFlight) // Response received
{
if (stateOfCharge <= 20) state = ERROR_STATE; // Very low battery, time to reset then sleep
else state = IDLE_STATE; // Battery OK, proceed
Particle.publish("State","Idle");
}
else if (millis() >= (publishTimeStamp + webhookWaitTime)) state = ERROR_STATE; // Response timed out
break;
case ERROR_STATE: // To be enhanced - where we deal with errors
if (!waiting) // Will use this flag to wiat 30 seconds before reset
{
waiting = true;
resetWaitTimeStamp = millis();
Particle.publish("State","Error");
}
if (millis() >= (resetWaitTimeStamp + resetWaitTime))
{
if (resetCount <= 3) System.reset(); // Today, only way out is reset
else {
FRAMwrite8(RESETCOUNT,0); // Time for a hard reset
digitalWrite(hardResetPin,HIGH); // Zero the count so only every three
}
}
break;
}
}
void recordCount() // Handles counting when the sensor triggers
{
sensorDetect = false; // Reset the flag
if (digitalRead(intPin)) {
Particle.publish("State","Counting");
if (Time.minute() > 2) timeTillSleep = napDelay; // reset the time we will wait before napping again
lastEvent = millis(); // Important to keep from napping too soon
t = Time.now();
hourlyPersonCount++; // Increment the PersonCount
FRAMwrite16(CURRENTHOURLYCOUNTADDR, static_cast<uint16_t>(hourlyPersonCount)); // Load Hourly Count to memory
dailyPersonCount++; // Increment the PersonCount
FRAMwrite16(CURRENTDAILYCOUNTADDR, static_cast<uint16_t>(dailyPersonCount)); // Load Daily Count to memory
FRAMwrite32(CURRENTCOUNTSTIME, t); // Write to FRAM - this is so we know when the last counts were saved
ledState = !ledState; // toggle the status of the LEDPIN:
digitalWrite(blueLED, ledState); // update the LED pin itself
}
}
void StartStopTest(boolean startTest) // Since the test can be started from the serial menu or the Simblee - created a function
{
if (startTest) {
inTest = true;
currentHourlyPeriod = Time.hour(); // Sets the hour period for when the count starts (see #defines)
currentDailyPeriod = Time.day(); // And the day (see #defines)
// Deterimine when the last counts were taken check when starting test to determine if we reload values or start counts over
time_t unixTime = FRAMread32(CURRENTCOUNTSTIME);
lastHour = Time.hour(unixTime);
lastDate = Time.day(unixTime);
dailyPersonCount = FRAMread16(CURRENTDAILYCOUNTADDR); // Load Daily Count from memory
hourlyPersonCount = FRAMread16(CURRENTHOURLYCOUNTADDR); // Load Hourly Count from memory
if (currentHourlyPeriod != lastHour) LogHourlyEvent();
}
else {
inTest = false;
t = Time.now();
FRAMwrite16(CURRENTDAILYCOUNTADDR, static_cast<uint16_t>(dailyPersonCount)); // Load Daily Count to memory
FRAMwrite16(CURRENTHOURLYCOUNTADDR, static_cast<uint16_t>(hourlyPersonCount)); // Load Hourly Count to memory
FRAMwrite32(CURRENTCOUNTSTIME, t); // Write to FRAM - this is so we know when the last counts were saved
hourlyPersonCount = 0; // Reset Person Count
dailyPersonCount = 0; // Reset Person Count
}
}
void LogHourlyEvent() // Log Hourly Event()
{
time_t LogTime = FRAMread32(CURRENTCOUNTSTIME); // This is the last event recorded - this sets the hourly period
unsigned int pointer = (HOURLYOFFSET + FRAMread16(HOURLYPOINTERADDR))*WORDSIZE; // get the pointer from memory and add the offset
LogTime -= (60*Time.minute(LogTime) + Time.second(LogTime)); // So, we need to subtract the minutes and seconds needed to take to the top of the hour
FRAMwrite32(pointer, LogTime); // Write to FRAM - this is the end of the period
FRAMwrite16(pointer+HOURLYCOUNTOFFSET,static_cast<uint16_t>(hourlyPersonCount));
FRAMwrite8(pointer+HOURLYBATTOFFSET,stateOfCharge);
unsigned int newHourlyPointerAddr = (FRAMread16(HOURLYPOINTERADDR)+1) % HOURLYCOUNTNUMBER; // This is where we "wrap" the count to stay in our memory space
FRAMwrite16(HOURLYPOINTERADDR,newHourlyPointerAddr);
}
void sendEvent()
{
char data[256]; // Store the date in this character array - not global
snprintf(data, sizeof(data), "{\"hourly\":%i, \"daily\":%i,\"battery\":%i, \"temp\":%i, \"resets\":%i}",hourlyPersonCount, dailyPersonCount, stateOfCharge, temperatureF,resetCount);
Particle.publish("Ubidots-Hook", data, PRIVATE);
hourlyPersonCountSent = hourlyPersonCount; // This is the number that was sent to Ubidots - will be subtracted once we get confirmation
currentHourlyPeriod = Time.hour(); // Change the time period
dataInFlight = true; // set the data inflight flag
}
void UbidotsHandler(const char *event, const char *data) // Looks at the response from Ubidots - Will reset Photon if no successful response
{
// Response Template: "{{hourly.0.status_code}}"
if (!data) { // First check to see if there is any data
Particle.publish("Ubidots Hook", "No Data");
return;
}
int responseCode = atoi(data); // Response is only a single number thanks to Template
if ((responseCode == 200) || (responseCode == 201))
{
Particle.publish("State","Response Received");
dataInFlight = false; // Data has been received
}
else Particle.publish("Ubidots Hook", data); // Publish the response code
}
void getSignalStrength()
{
CellularSignal sig = Cellular.RSSI(); // Prototype for Cellular Signal Montoring
int rssi = sig.rssi;
int strength = map(rssi, -131, -51, 0, 5);
snprintf(Signal,17, "%s: %d", levels[strength], rssi);
}
int startStop(String command) // Will reset the local counts
{
if (command == "1" && !inTest)
{
StartStopTest(1);
return 1;
}
else if (command == "0" && inTest)
{
StartStopTest(0);
return 1;
}
else return 0;
}
int resetFRAM(String command) // Will reset the local counts
{
if (command == "1")
{
ResetFRAM();
return 1;
}
else return 0;
}
int resetCounts(String command) // Resets the current hourly and daily counts
{
if (command == "1")
{
FRAMwrite16(CURRENTDAILYCOUNTADDR, 0); // Reset Daily Count in memory
FRAMwrite16(CURRENTHOURLYCOUNTADDR, 0); // Reset Hourly Count in memory
FRAMwrite8(RESETCOUNT,0); // If so, store incremented number - watchdog must have done This
resetCount = 0;
hourlyPersonCount = 0; // Reset count variables
dailyPersonCount = 0;
hourlyPersonCountSent = 0; // In the off-chance there is data in flight
dailyPersonCountSent = 0;
dataInFlight = false;
return 1;
}
else return 0;
}
int resetNow(String command) // Will reset the Electron
{
if (command == "1")
{
System.reset();
return 1;
}
else return 0;
}
int hardResetNow(String command) // Will perform a hard reset on the Electron
{
if (command == "1")
{
digitalWrite(hardResetPin,HIGH);
return 1;
}
else return 0;
}
int sleepInFive(String command) // Will perform a hard reset on the Electron
{
if (command == "1")
{
timeTillSleep = 300000; // Set this equal to 5 minutes. Will reset in the program once it goes to NAPPING_STATE
return 1;
}
else return 0;
}
int sendNow(String command) // Function to force sending data in current hour
{
if (command == "1")
{
state = REPORTING_STATE;
return 1;
}
else return 0;
}
int getTemperature()
{
int reading = analogRead(tmp36Pin); //getting the voltage reading from the temperature sensor
float voltage = reading * 3.3; // converting that reading to voltage, for 3.3v arduino use 3.3
voltage /= 4096.0; // Electron is different than the Arduino where there are only 1024 steps
int temperatureC = int(((voltage - 0.5) * 100)); //converting from 10 mv per degree with 500 mV offset to degrees ((voltage - 500mV) times 100) - 5 degree calibration
temperatureF = int((temperatureC * 9.0 / 5.0) + 32.0); // now convert to Fahrenheit
return temperatureF;
}
void sensorISR()
{
sensorDetect = true; // sets the sensor flag for the main loop
}
void watchdogISR()
{
digitalWrite(donePin, HIGH); // Pet the watchdog
digitalWrite(donePin, LOW);
}
bool connectToParticle()
{
if (!Cellular.ready())
{
Cellular.on(); // turn on the Modem
Cellular.connect(); // Connect to the cellular network
if(!waitFor(Cellular.ready,90000)) return false; // Connect to cellular - give it 90 seconds
}
Particle.connect(); // Connect to Particle
if(!waitFor(Particle.connected,30000)) return false; // Connect to Particle - give it 30 seconds
return true;
}
bool disconnectFromParticle()
{
Particle.disconnect(); // Disconnect from Particle in prep for sleep
waitFor(notConnected,10000);
Cellular.disconnect(); // Disconnect from the cellular network
delay(3000);
Cellular.off(); // Turn off the cellular modem
return true;
}
bool notConnected() {
return !Particle.connected(); // This is a requirement to use waitFor
}
void takeMeasurements() {
getSignalStrength(); // Test signal strength at startup
getTemperature(); // Get Temperature at startup as well
stateOfCharge = int(batteryMonitor.getSoC()); // Percentage of full charge
}
Thanks,
Chip